-
清水建設株式会社様におけるAIソリューション事例
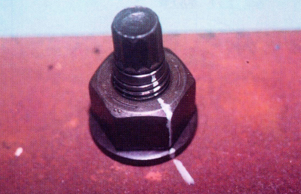
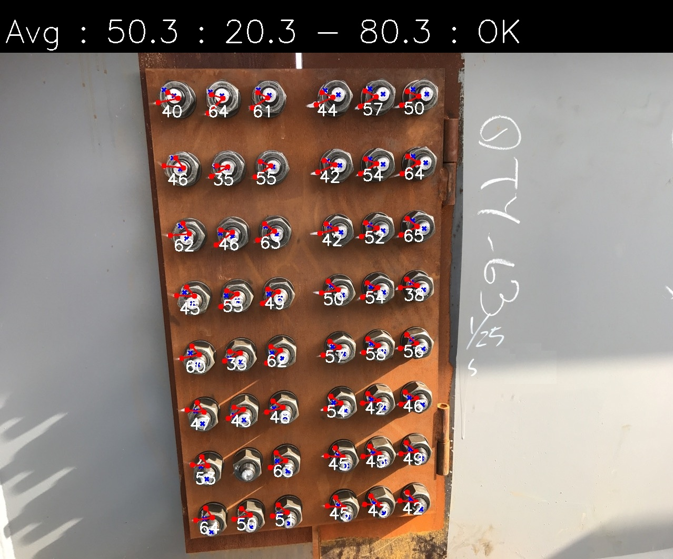
【人工知能による鉄骨高力ボルト締付け自動検査Webシステム(プロトタイプ)の開発】高力ボルト本締め作業の検査における現状と課題■ 建設現場における高力ボルト本締め検査とは?
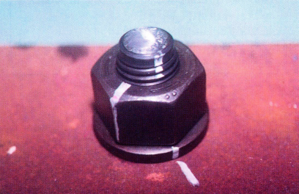
ボルト群の全てのナット回転量の平均値を算定し、群の平均回転量に対して±30°の範囲内にあるものを合格とする一次締め後マーキング本締め完了
(ナット部のマーキングは回転)https://www.nikkenren.com/kenchiku/sekou/steel_frame_Q&A/
鉄骨工事Q&A(一般財団法人日本建設業連合会)より現状建設現場において、一つ一つのナットの回転角を目測で行い、ナット回転角の集計、平均値算定、合否判定を手作業で行っている
課題人手作業で時間が掛かるだけでなく、目測と手計算のため正確性に欠けている。また、合否判定のエビデンスを残すことも課題である
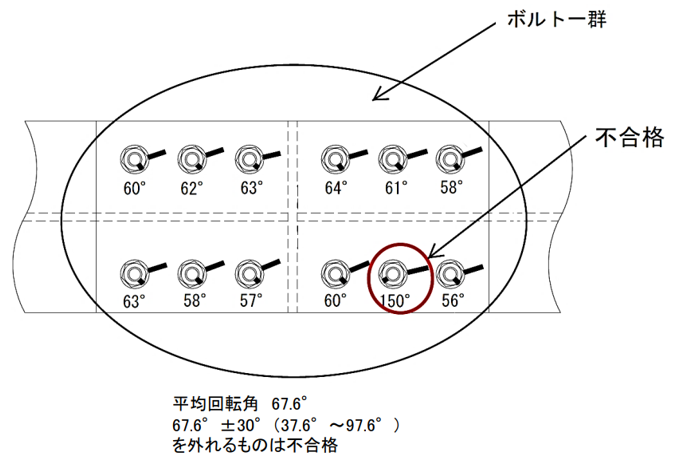
AIソリューション!AIによってマーキング位置を自動認識し
角度算定・合否判定を行うWebシステムを開発
合否判定に要する時間を1/10以下に!
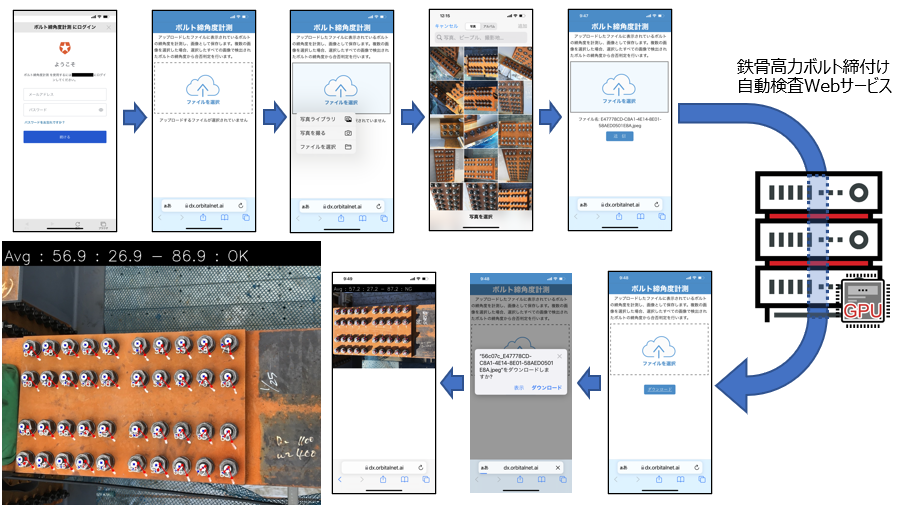
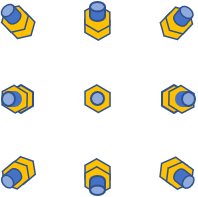
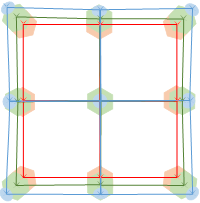
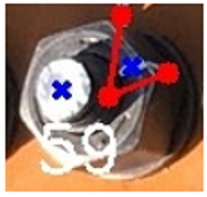
シンプルなWebインターフェイスで現場でもスマートフォンで簡単操作■ボルト本締め検査用画像(入力画像)■AIによるボルト締付け角測定と合否判定(出力画像)撮影時のボルト・ナットの傾きもAI+射影変換(Homography)で自動補正■全体を撮影した際のボルト・ナット・座金の見え方■座金を底面とした場合、ナット・ボルトの中心は高さがあるため、傾いて投影される■取付面、ナット上部、ボルト上部の3平面上のひずみを補正する(元の位置に戻す)必要がある■射影変換なし 31度■射影変換あり 59度
建設DX:建設現場におけるAI活用事例






-
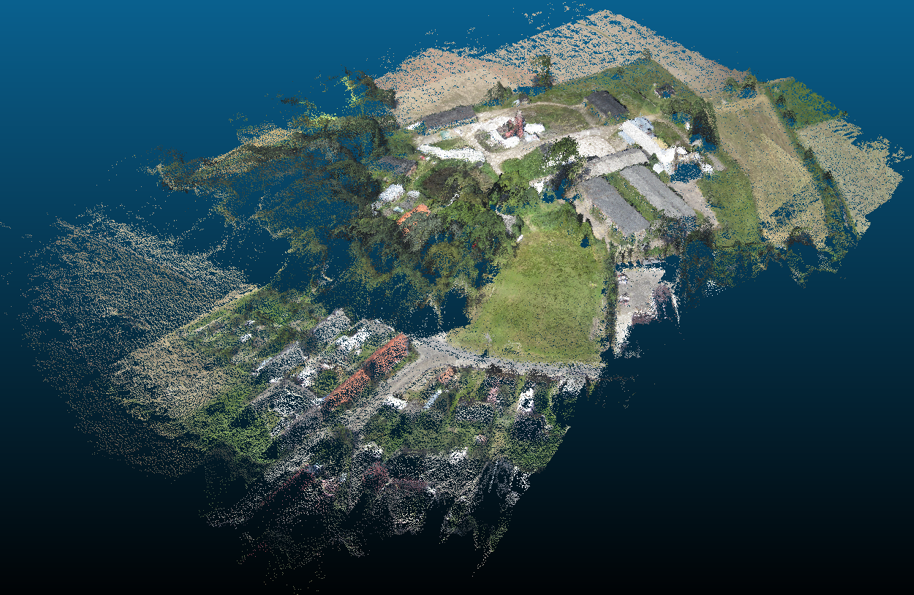
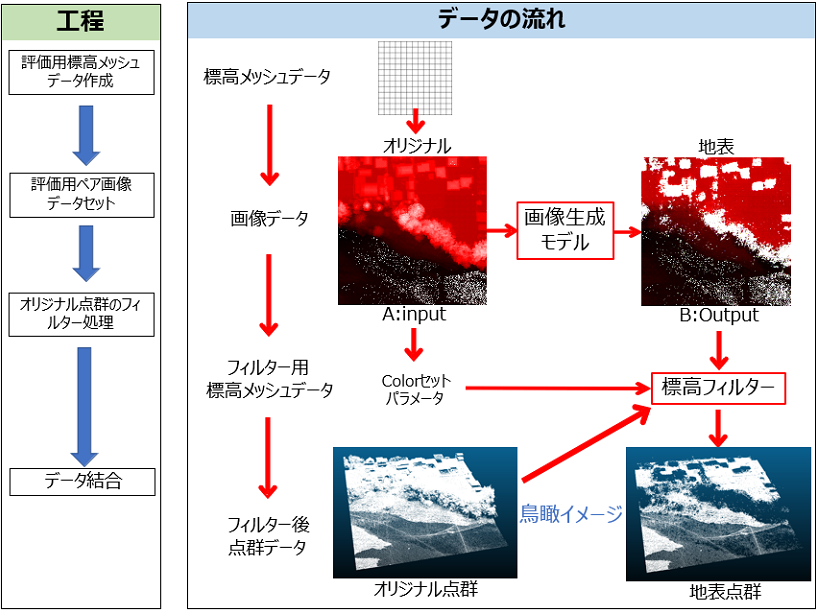
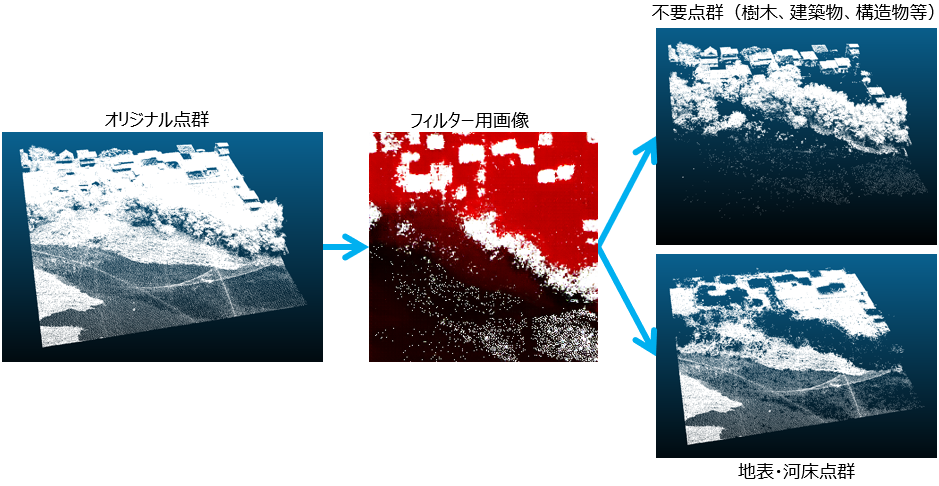
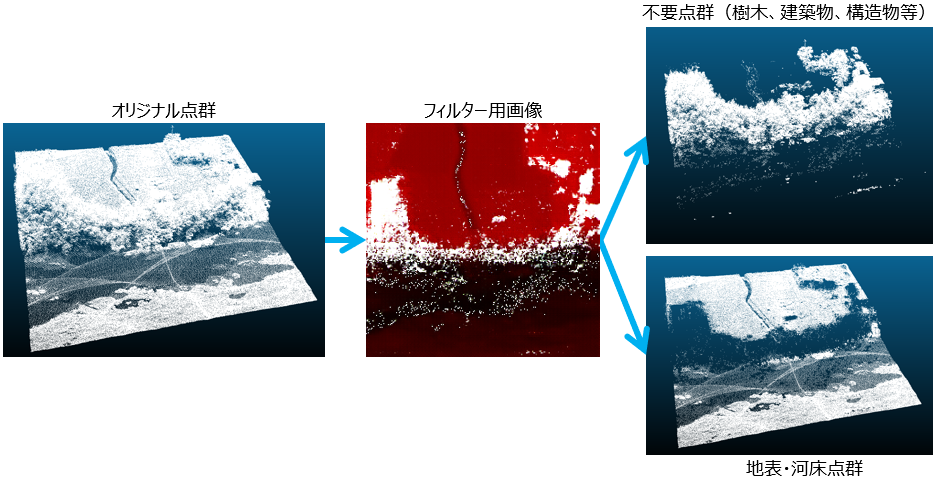
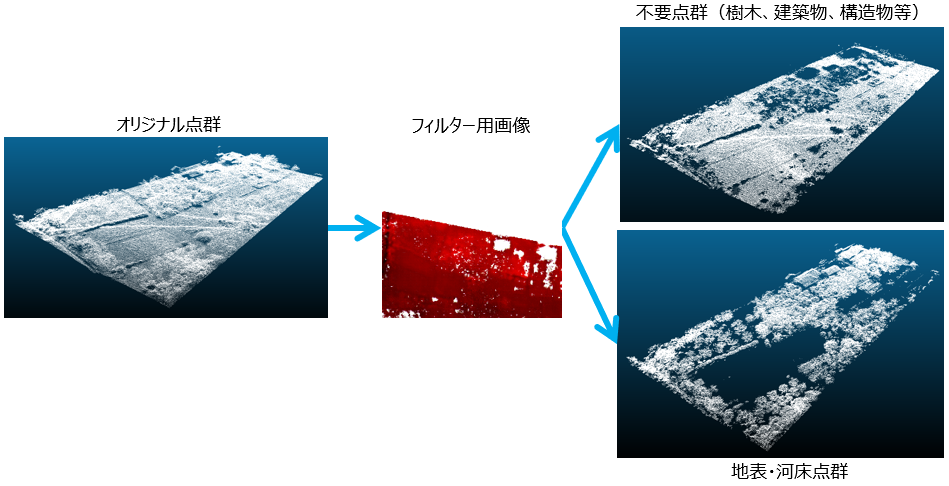
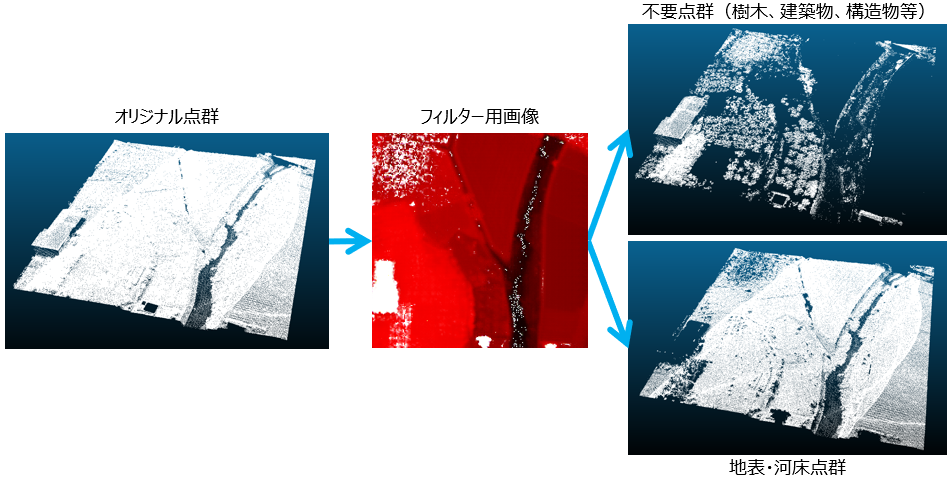
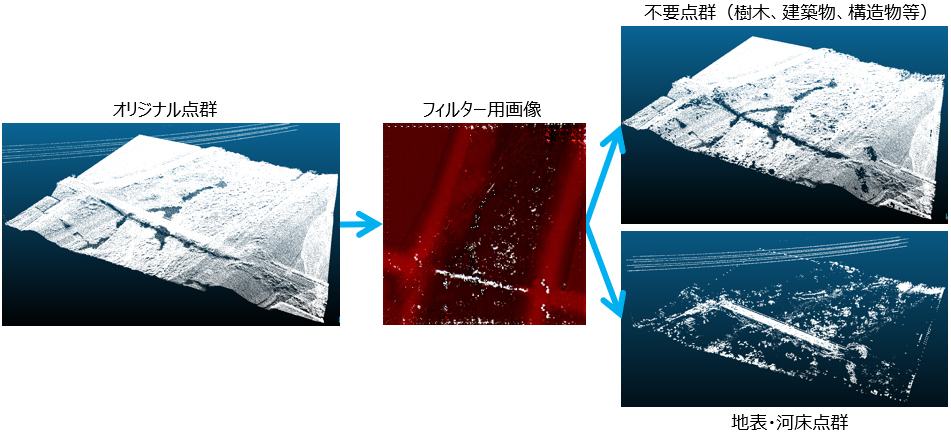
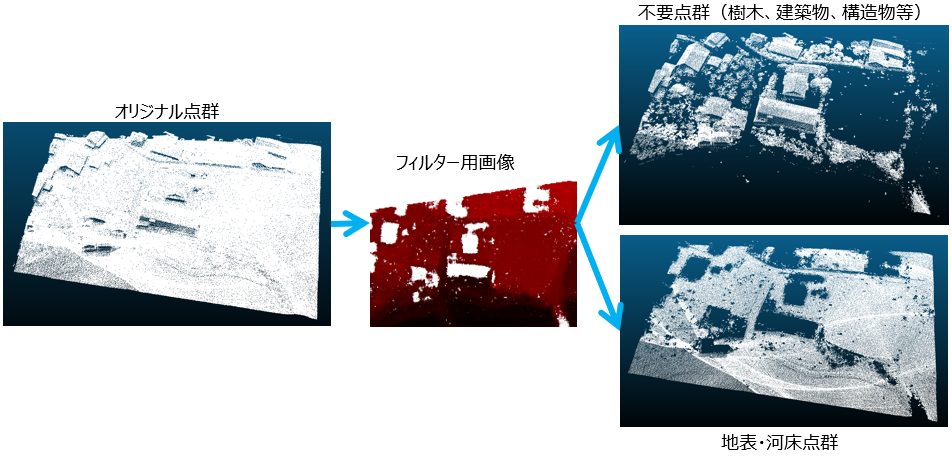
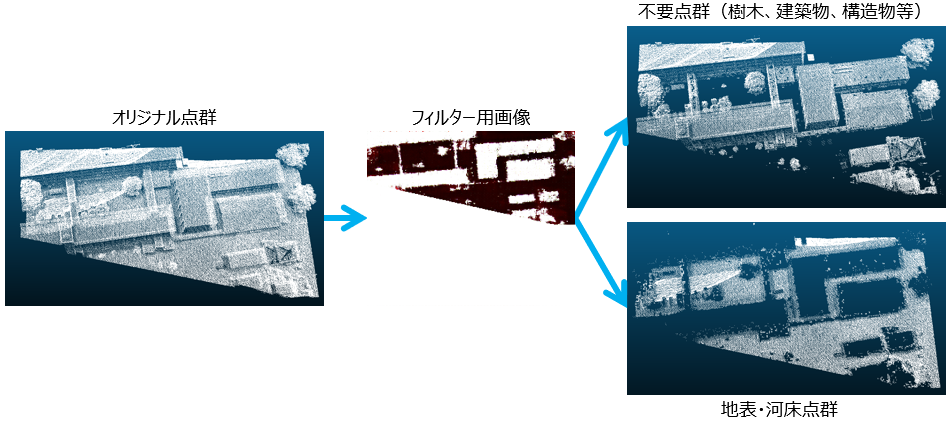
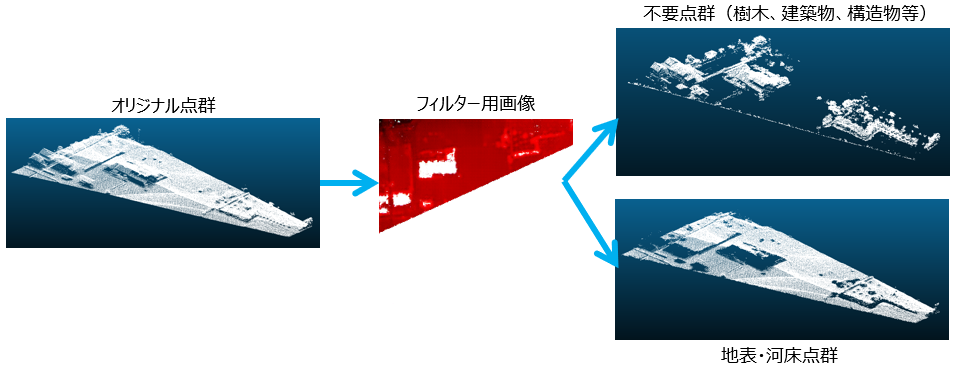
航空レーザー測量点群の自動フィルタリング
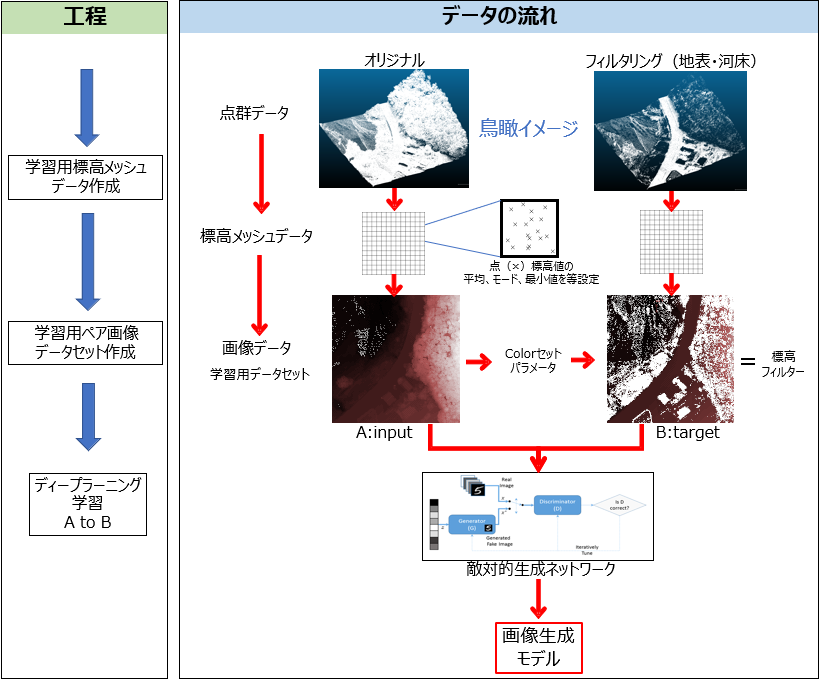
航空レーザー測量・測深点群データの特徴航空レーザー等で取得した点群データの形状は、一般の3Dオブジェクトの形状と異なり、オーバーハング形状が取得できない。 つまり上空からみて物体のブラインド(裏側)になる部分のデータがない。したがって、DEMのような2次元の画像情報に置き換えることができる。提案手法の概要・深層学習を用いてオリジナル点群データからフィルタリング後の点群データを生成するように学習させる
・その時、オリジナル点群データ、及びフィルタリング後の点群データについては2次元の画像に置き換えて処理する。つまりオリジナル画像からフィルタリング後画像を生成する手法を用いる
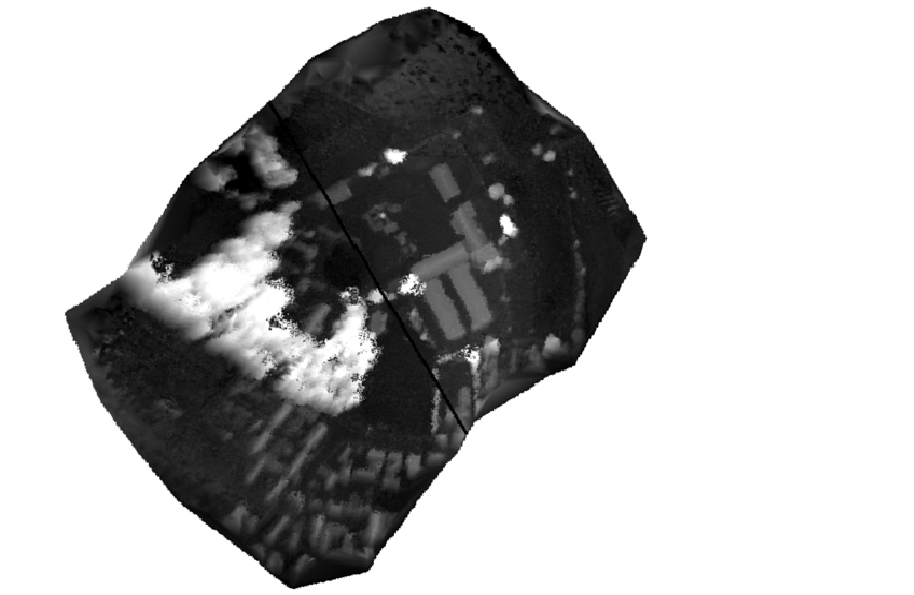
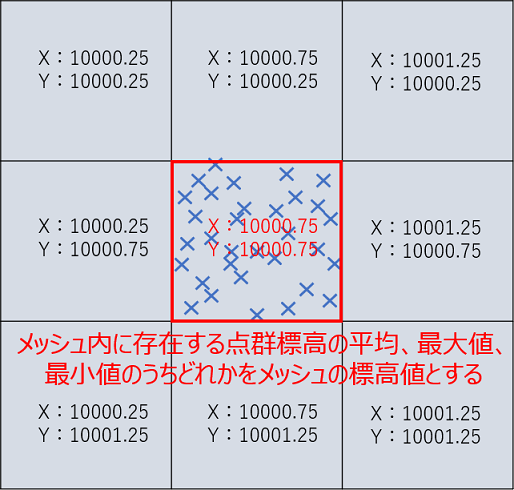
・オリジナル点群データはランダム点群なので入力用画像(DEM)に置き換え、深層学習によって出力した結果画像(DEM)をフィルターとして、ランダム点群をフィルタリングする手法を用いて不要点群の除去を実現する◆(注1)点群から標高メッシュデータの作成0.5m間隔のメッシュデータを作成する場合、メッシュ(画像)の中心座標から0.25mのオフセットでメッシュ領域を作成し、そのメッシュ領域に存在する点群を集計するレーザー点群
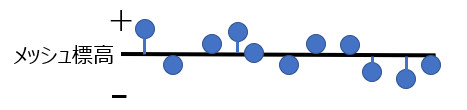
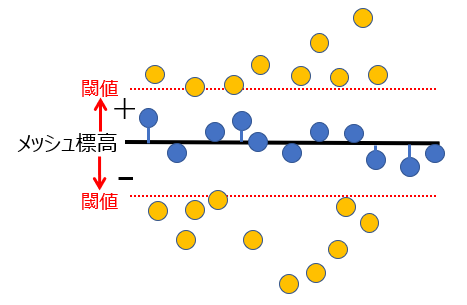
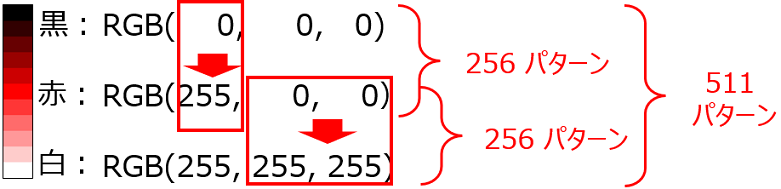
◆(注2)フィルターの仕組みメッシュの標高値は不要な点群を取り除いたフィルタリング点群の平均値である上からメッシュ(0.5m×0.5m)横からこの時、メッシュ標高値に閾値を設定してフィルタリングされていないオリジナルデータの標高値と比較することで、閾値外の値(点群)を取り除くことができる◆(注3)標高値への色の割り当てについて黒→赤→白の色域パターンを使用した場合512色を表現できる
標高差(最大-最小)を500程度に分割し、最小値の分割域から色を割り当てる。
NoDATA = RGB(255,255,255)と色の区別ができるよう、GB(220, 220)以上は使用しない。
例:最小値 = RGB(0,0,0)
最大値 = RGB(255,219,219)
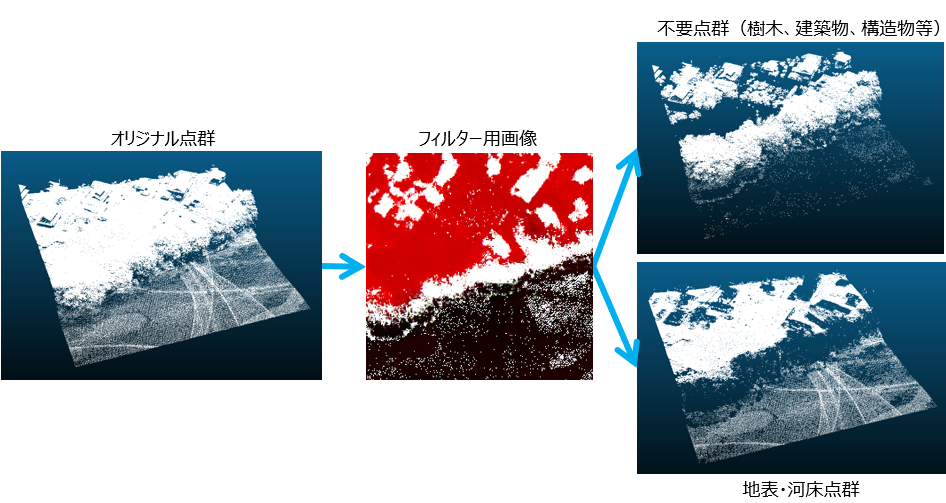
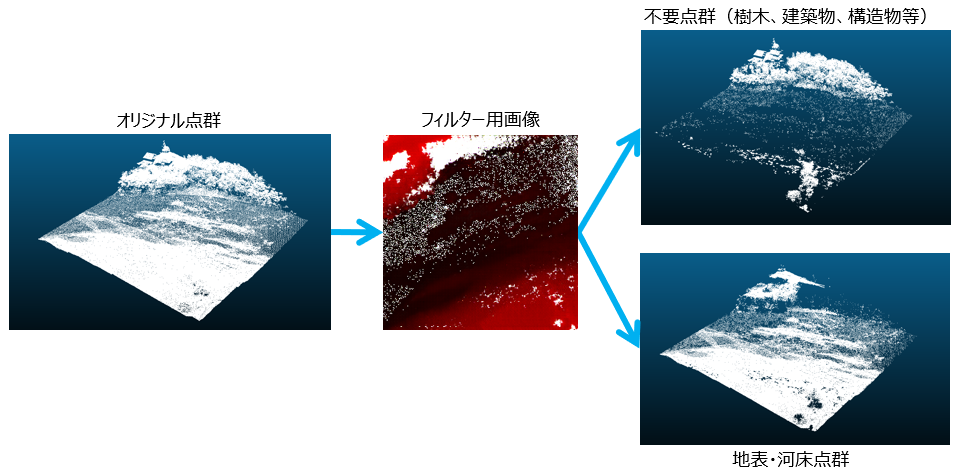
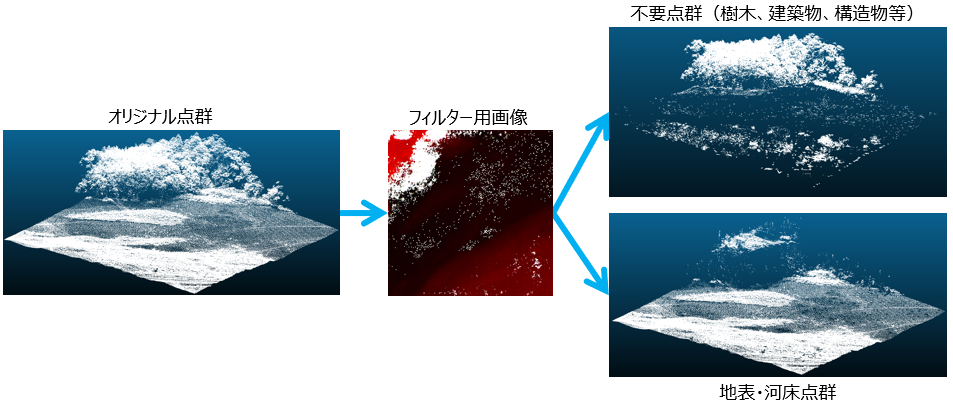
但し NoDATA = RGB(255,255,255)学習時における工程とデータの流れ推論時における工程とデータの流れ推論結果例